Capítulo 5. Arrays
En los capítulos anteriores se han explorado con algunos ejemplos prácticos las nociones básicas sobre los elementos necesarios para hacer programas en Julia. Llegados a este punto, podemos revisitar y explorar en más profundidad cada uno de los conceptos estudiados, para sacarles el máximo provecho.
Empezaremos por el de las variables conocidas como arrays, entre las que se cuentan los vectores y las matrices que se introdujeron en el capítulo sobre series y tablas de datos. Los arrays son series organizadas de datos que pueden tener una, dos o más dimensiones. En el presente capítulo veremos más detalles sobre este tipo de variables, que son un elemento fundamental en la mayoría de cálculos numéricos, y por lo tanto conviene dominar desde un principio. Además, estos detalles servirán como introducción práctica a otros asuntos importantes para la programación en Julia.
Sintaxis para la creación de arrays
Vectores
Hay distintas formas de crear y componer arrays, algunas de las cuales ya se han visto en el capítulo 2. El caso más sencillo es el de los vectores (arrays unidimensionales), que se pueden definir escribiendo sus valores entre corchetes, separados por comas:
julia> numeros = [1,2,3,4]4-element Vector{Int64}: 1 2 3 4
Por otro lado, la forma más general de crear arrays de cualquier dimensión es mediante la función cat (De "concatenar"), que utiliza el argumento con nombre dims para indicar en qué dimensión se añaden los valores introducidos. Por ejemplo, una forma alternativa (aunque menos práctica) de crear el vector numeros anterior es:
julia> cat(1,2,3,4, dims=1)4-element Vector{Int64}: 1 2 3 4
Matrices
A la hora de trabajar con matrices, como ya se ha visto antes, se considera que la primera dimensión representa las filas, y la segunda representa las columnas. Por este motivo, una matriz se puede crear concatenando vectores a lo largo de una segunda dimensión (por columnas). Por ejemplo:
julia> sudoku = cat( [1,2,3,4], [4,3,1,2], [3,4,2,1], [2,1,4,3], dims=2)4×4 Matrix{Int64}: 1 4 3 2 2 3 4 1 3 1 2 4 4 2 1 3
Como las matrices son un objeto de cálculo tan habitual, al igual que pasa con los vectores existen formas más prácticas de componerlas. La operación cat(a, b..., dims=2) se puede escribir como hcat(a, b...) –con "h" de "horizontal"–. Por lo tanto el sudoku anterior podría haberse escrito como:
julia> sudoku = hcat(
[1,2,3,4],
[4,3,1,2],
[3,4,2,1],
[2,1,4,3]
)Cuando los elementos a concatenar horizontalmente son más cortos, resulta aún más conciso escribirlos entre corchetes (como los vectores), pero separados por espacios en lugar de comas para indicar que se concatenan como una fila:
julia> fila = [1 2 3 4]1×4 Matrix{Int64}: 1 2 3 4
Así, tenemos otra forma de componer matrices, que es concatenando filas verticalmente. Esto se hace con la función vcat:
julia> sudoku2 = vcat( [1 2 3 4], [3 4 2 1], [4 3 1 2], [2 1 4 3] )4×4 Matrix{Int64}: 1 2 3 4 3 4 2 1 4 3 1 2 2 1 4 3
Existen dos alternativas abreviadas de vcat usando corchetes: una es separando los elementos a concatenar con punto y coma, y la otra separándolos por cambios de línea, sin ningún otro separador. Así pues, este segundo sudoku podría haberse escrito de las dos siguientes maneras:
julia> [
[1 2 3 4];
[3 4 2 1];
[4 3 1 2];
[2 1 4 3]
]
julia> [
[1 2 3 4]
[3 4 2 1]
[4 3 1 2]
[2 1 4 3]
]Y una forma más de componer matrices, especialmente práctica en estos casos en los que todos los valores son escalares breves de escribir, es mediante la operación combinada de concatenación horizontal y vertical. La función correspondiente es hvcat, y su forma abreviada utiliza una sola pareja de corchetes para todo el conjunto de datos, y los mismos separadores entre elementos que se emplean para la concatenación horizontal y vertical:
julia> [1 2 3 4;
3 4 2 1;
4 3 1 2;
2 1 4 3]La función hvcat puede ser útil cuando la serie de valores no se puede escribir a mano, por ejemplo porque está contenida (quizás con una estructura distinta) en otras variables. La sintaxis de esta función es:
hvcat(ncols, valores...)donde ncols es el número de columnas esperado en cada fila, y valores... representa un número indefinido de argumentos (múltiplo de ncols) con los valores a organizar, ordenados "fila a fila" (como se leen en la forma abreviada). Por ejemplo (cambiando a una matriz de cadenas de texto, para que se vea con más claridad la diferencia de los argumentos):
julia> hvcat(3, "a", "b", "c", "x", "y", "z")2×3 Matrix{String}: "a" "b" "c" "x" "y" "z"
En un ejemplo más realista los valores estarían agrupados en otra variable, como podría ser un vector. Los valores individuales de dicho vector podrían pasarse a la función hvcat mediante la técnica de splatting (añadiendo puntos suspensivos al nombre de la variable), como se indicaba en la sección sobre Agrupaciones de argumentos del capítulo 3:
julia> letras = ["a", "b", "c", "x", "y", "z"];julia> hvcat(3, letras...)2×3 Matrix{String}: "a" "b" "c" "x" "y" "z"
Otro caso de uso práctico de hvcat es para crear una matriz con una sola columna (pero con dos dimensiones, no como los vectores). Véase la sutil diferencia entre los dos siguientes resultados:
julia> vector = ["a", "b", "c"]3-element Vector{String}: "a" "b" "c"julia> matriz_columna = hvcat(1, "a", "b", "c")3×1 Matrix{String}: "a" "b" "c"
Aunque la disposición de los valores es idéntica, el tipo de array es distinto: El primero es un Array{String, 1} (es decir, un array cuyos elementos son de tipo String con una sola dimensión), que contiente "3 elementos". Por contra, el segundo es un Array{String, 2} (con dos dimensiones), de tamaño 3×1.
Para finalizar con las matrices y las distintas formas de concatenar valores en dos dimensiones, resulta pertinente destacar la diferencia entre el uso de la coma y el punto y coma (o el cambio de línea) como separador de elementos: la coma es el separador de elementos en vectores, mientras que el punto y coma indica que el siguiente elemento se concatene con los anteriores añadiendo filas al array –sea un vector o una matriz–. Esto explica los distintos resultados de estas dos operaciones:
julia> unodos = [1, 2];julia> [unodos; 3] # concatena el tres como otra fila3-element Vector{Int64}: 1 2 3julia> [unodos, 3] # crea un vector añadiendo el tres2-element Vector{Any}: [1, 2] 3
La diferencia entre los separadores solo se diluye al crear un vector a partir de elementos sueltos, aunque ni siquiera en ese caso son intercambiables, pues no se pueden mezclar:
julia> [1, 2, 3] == [1; 2; 3] # Ambas expresiones son equivalentes
true
julia> [1, 2; 3] # Pero esto no funciona
ERROR: syntax: unexpected semicolon in array expressionLas funciones cat y derivadas, así como la composición de matrices escribiendo valores entre corchetes, es muy semejante a la de Matlab y Octave, pero los que estén acostumbrados a este otro lenguaje de programación han de tener precaución para no confundirse al usar Julia. En Matlab la coma tiene un uso distinto a la hora de crear matrices, y los vectores se interpretan como matrices de una fila, al contrario que en Julia.
Arrays n-dimensionales
Los arrays con más de dos dimensiones se crean con la función cat descrita para vectores y matrices, sin ninguna forma alternativa o abreviada. Por ejemplo, la operación que habría que realizar para componer los dos sudokus como dos "capas" de una hipermatriz tridimensional es:
julia> cat(sudoku, sudoku2, dims=3)4×4×2 Array{Int64, 3}: [:, :, 1] = 1 4 3 2 2 3 4 1 3 1 2 4 4 2 1 3 [:, :, 2] = 1 2 3 4 3 4 2 1 4 3 1 2 2 1 4 3
Por otro lado, a partir de un conjunto de datos estructurados en un array con ciertas dimensiones se puede crear otro con dimensiones distintas pero compatibles (es decir que en conjunto pueda recoger el mismo número de elementos), a través de la función reshape. El primer argumento de esta matriz es el conjunto de datos a redimensionar, y luego siguen las dimensiones deseadas, en orden. En una (y solo una) de las dimensiones el número objetivo puede sustituirse por dos puntos, para indicar que se calcule automáticamente a partir del número de elementos y las demás dimensiones. Por ejemplo:
julia> matriz = [ 0.1 0.01 1 10; 0.2 0.02 2 20; 0.3 0.03 3 30 ]3×4 Matrix{Float64}: 0.1 0.01 1.0 10.0 0.2 0.02 2.0 20.0 0.3 0.03 3.0 30.0julia> reshape(matriz, 3,2,:) # Varias capas de 3×23×2×2 Array{Float64, 3}: [:, :, 1] = 0.1 0.01 0.2 0.02 0.3 0.03 [:, :, 2] = 1.0 10.0 2.0 20.0 3.0 30.0
Un caso típico en el que se utiliza esta operación es cuando el conjunto de datos proviene de un archivo de texto, que se ha leído en forma de matriz a través de readdlm o de forma equivalente, que se quiere pasar a una hipermatriz con más dimensiones.
Además, reshape también puede servir de contrapartida a hvcat para crear matrices a partir de un vector de datos, cuando estos se quieren disponer "columna a columna".
Generación automatizada de arrays
Valores predefinidos
Hay algunos arrays prototípicos que se emplean a menudo, y se pueden crear de forma rápida con funciones específicas para ellos, sin tener que definir sus valores uno a uno. Por ejemplo, las funciones zeros y ones sirven para crear arrays compuestos enteramente de ceros o unos, con unas dimensiones dadas. También existen las funciones análogas trues and falses, para crear arrays con los correspondientes valores lógicos (verdadero o falso). Por ejemplo, podemos crear las siguientes matrices de tamaño 2×3 (aunque estas funciones sirven para crear arrays con cualquier número de dimensiones):
julia> zeros(2,3)2×3 Matrix{Float64}: 0.0 0.0 0.0 0.0 0.0 0.0julia> ones(2,3)2×3 Matrix{Float64}: 1.0 1.0 1.0 1.0 1.0 1.0julia> trues(2,3)2×3 BitMatrix: 1 1 1 1 1 1julia> falses(2,3)2×3 BitMatrix: 0 0 0 0 0 0
Por otro lado, la función fill permite crear un array compuesto por otro valor (no necesariamente números), que ha de pasarse como primer argumento:
julia> fill("abc", 2, 3)2×3 Matrix{String}: "abc" "abc" "abc" "abc" "abc" "abc"
Si ya se tiene una matriz preparada para recibir los valores, se puede utilizar la función fill! (con una exclamación al final del nombre) para rellenarla con un valor dado, en lugar de tener que crear una matriz nueva.
julia> matriz = zeros(2,3)2×3 Matrix{Float64}: 0.0 0.0 0.0 0.0 0.0 0.0julia> fill!(matriz, 0.5)2×3 Matrix{Float64}: 0.5 0.5 0.5 0.5 0.5 0.5julia> matriz2×3 Matrix{Float64}: 0.5 0.5 0.5 0.5 0.5 0.5
Valores aleatorios
Hay situaciones en las que se desea crear arrays con valores aleatorios, por ejemplo para probar programas que se están desarrollando, poner ejemplos de uso, etc. En el capítulo de gráficos ya vimos el uso de la función randn para generar números aleatorios distribuidos según una normal. Por otro lado, la función rand permite generar números distribuidos uniformemente entre 0 y 1, con la misma sintaxis que randn, zeros y ones:
julia> rand(2,3)2×3 Matrix{Float64}: 0.521214 0.890879 0.525662 0.586807 0.190907 0.390588
Además, tanto randn como rand generan números aleatorios aislados (escalares, no contenidos en ningún array), si no se les pasa ningún argumento:
julia> rand()0.044818005017491114julia> randn()1.5491245530427917
Y además de generar números de una distribución uniforme, rand también sirve para seleccionar aleatoriamente elementos de una serie predefinida de valores (no solo números), que se le ha de pasar como primer argumento:
julia> letras = ["a","b","c","d"];julia> rand(letras, 3)3-element Vector{String}: "c" "b" "c"
En el módulo estándar Random también hay otras funciones no importadas por defecto, para generar números aleatorios a partir de otras distribuciones, como randexp (distribución exponencial de media igual a 1) o bitrand (selección aleatoria de números binarios), así como variantes para "rellenar" arrays ya existentes con números aleatorios: rand!, randn!, etc., que se manejan con la misma sintaxis que fill!. Para acceder a ellas se puede importar el módulo con la orden using Random.
Si se quiere generar estos números aleatorios (en realidad pseudoaleatorios) de forma reproducible, es decir que sean los mismos cuando se vuelva a ejecutar el programa, se puede fijar la "semilla" del algoritmo de aleatorización, con la función Random.seed! (antes hay que importar el módulo Random). Esta función toma solo un argumento, que es un número entero arbitrario (sirve cualquiera, pero ha de ser el mismo para conseguir resultados repetibles):
julia> rand() # un número aleatorio0.8362285750521512julia> rand() # otro número aleatorio distinto0.04090613602769255julia> Random.seed!(111); # fijamos semillajulia> rand() # número repetible0.42495556892617514julia> rand() # siguiente número repetible0.4288835273937086julia> Random.seed!(111); # misma semillajulia> rand() # mismos resultados que antes...0.42495556892617514julia> rand()0.4288835273937086
Valores indefinidos
También se pueden crear arrays con valores indefinidos, con la finalidad de darles valores concretos más adelante. Esto es más eficiente que crearlos con un valor predefinido, y además permite que el array contenga cualquier tipo de datos. Veamos dos ejemplos: uno para crear una hipermatriz de números enteros, y otro para crear un vector con 3 cadenas de texto:
julia> Array{Int}(undef, 1, 3, 2)1×3×2 Array{Int64, 3}: [:, :, 1] = 4294967297 4294967297 4294967297 [:, :, 2] = 4294967297 8589934594 0julia> Array{String}(undef, 3)3-element Vector{String}: #undef #undef #undef
En todos los casos, la función que crea el array toma como nombre Array{T}, donde T es el tipo de elemento que se quiere definir (en los ejemplos Int y String; véanse más detalles sobre los tipos en el siguiente apartado). El primer argumento de la función es siempre la palabra clave undef, y los siguientes son las dimensiones del array creado.
Para mayor control se pueden utilizar constructores más específicos, como Array{T, N}, donde N es un número entero que define la cantidad de dimensiones del array, o Vector{T} (equivalente a Array{T, 1}), o Matrix{T} (equivalente a Array{T, 2}). En estos casos el número de dimensiones proprocionado como argumentos ha de coincidir con N.
Otra forma de crear arrays con valores indefinidos es tomando otros arrays existentes como patrón, con la posibilidad de modificar su tipo o número de dimensiones, mediante la función similar:
julia> patron = zeros(2,3)2×3 Matrix{Float64}: 0.0 0.0 0.0 0.0 0.0 0.0julia> similar(patron) # Otra matriz como la anterior2×3 Matrix{Float64}: 6.90254e-310 6.90254e-310 6.90254e-310 6.90254e-310 6.90254e-310 6.90254e-310julia> similar(patron, String) # Mismas dimensiones pero otro tipo de elemento2×3 Matrix{String}: #undef #undef #undef #undef #undef #undefjulia> similar(patron, 1,2) # Otras dimensiones1×2 Matrix{Float64}: 6.90254e-310 6.90254e-310julia> similar(patron, Int, 1, 2) # Otro tipo y dimensiones1×2 Matrix{Int64}: 139711289505328 139711289506192
Indexación y manipulación
Aunque en los capítulos anteriores ya se ha visto como extraer "partes" de un array (p.ej. elementos aislados, columnas...), vamos a describir más detalles y trucos para tener una visión más completa.
Es posible leer o modificar uno o varios valores de un array, indexando la posición seleccionar entre corchetes ([]), siguiendo el orden fila-columna-etc. (la primera posición se indica con el número 1). Si solo se utiliza un índice de posición, hay que tener en cuenta que los valores están internamente ordenados por columnas:
julia> mat = [1 10 0.1; 2 20 0.2; 3 30 0.3]3×3 Matrix{Float64}: 1.0 10.0 0.1 2.0 20.0 0.2 3.0 30.0 0.3julia> mat[1, 2] # Primera fila, segunda columna de la matriz:10.0julia> mat[3 + 1] # Lo mismo: primer valor tras la primera columna:10.0
Se pueden utilizar vectores de índices, para seleccionar varios valores o combinaciones de filas y columnas en la misma operación. Por ejemplo, para intercambiar la segunda y tercera filas de la matriz (completas, es decir los valores de las tres columnas para esas dos filas):
julia> # Véase que los índices de las filas se invierten al reasignarlos: mat[[2,3],[1,2,3]] = mat[[3,2],[1,2,3]];julia> mat3×3 Matrix{Float64}: 1.0 10.0 0.1 3.0 30.0 0.3 2.0 20.0 0.2
Indexación mediante "rangos"
Estos conjuntos de índices se pueden escribir de forma más cómoda a través de "rangos", un tipo especial de variable que representa una serie aritmética acotada. Los rangos se definen a través de tres valores: el primero y último de la serie (a y b, respectivamente), más el "paso" o diferencia entre dos números consecutivos (s), con la sintaxis a:s:b. Por ejemplo, la serie de números impares entre 1 y 10:
julia> impares = 1:2:101:2:9
En este ejemplo el valor final asignado (10) no es compatible con la definición del valor inicial y el paso, por lo tanto se sustituye automáticamente por 9, el valor compatible más cercano (dentro del rango entre los valores inicial y final asignados). El conjunto de valores representados se entiende más fácilmente si el resultado se convierte a un vector, usando la función collect:
julia> collect(impares)5-element Vector{Int64}: 1 3 5 7 9
Los números de un rango no han de ser necesariamente enteros ni positivos, aunque es lo lógico cuando se quiere definir un conjunto de índices. Por otro lado, el paso s es un valor opcional, que por defecto se asume igual a 1. Para construir una serie ordenada de mayor a menor, además de definir los valores inicial y final en el orden adecuado, se ha de definir un paso negativo. Olvidar este detalle hace que la serie creada sea vacía. Por ejemplo, para una "cuenta atrás" de 5 a 1 (convertida a vector para más claridad):
julia> collect(5:-1:1) # Correcto5-element Vector{Int64}: 5 4 3 2 1julia> collect(5:1) # Serie vacíaInt64[]
Algunos trucos útiles con rangos cuando se usan como índices son: las palabras clave begin y end hacen referencia respectivamente a la primera y la última posición/fila/columna indexable en el array manipulado; y los dos puntos aislados (:) hacen referencia a "todas" las posiciones, filas o columnas.
julia> numeros = [1, 2, 5, 10];julia> numeros[end:-1:begin] # Serie de números invertida: # Intercambiar las filas primera y segunda (antes tercera) de `mat`4-element Vector{Int64}: 10 5 2 1julia> mat[1:2,:] = mat[[2,1],:];julia> mat3×3 Matrix{Float64}: 3.0 30.0 0.3 1.0 10.0 0.1 2.0 20.0 0.2
El uso de begin como índice para referirse al primer elemento no funciona en versiones anteriores a Julia 1.4.
Tipos de elementos
En Julia todos los objetos se caracterizan por el tipo de variable al que pertenecen. El tipo de una variable se puede extraer con la función typeof:
julia> typeof(1) # número enteroInt64julia> typeof(1.0) # número decimalFloat64julia> typeof("abc") # cadena de textoString
Como ya se ha visto, los elementos contenidos en un array son siempre de un tipo de variable específico. El tipo de elementos de un array se muestra en la descripción del mismo, y se puede extraer con la función eltype. En el siguiente ejemplo tenemos un vector de elementos de tipo String:
julia> letras = ["a", "b", "c"]3-element Vector{String}: "a" "b" "c"julia> eltype(letras)String
Este detalle de los arrays es importante, porque restringe los valores que se pueden introducir. Por ejemplo, en un vector de números enteros no se pueden introducir cadenas de texto, ni tampoco números decimales arbitrarios, aunque sí se pueden introducir números que se puedan convertir al tipo correspondiente:
julia> numeros = [1, 2, 3];
julia> numeros[1] = "cero";
ERROR: MethodError: Cannot `convert` an object of type String to an object of type Int64
[...]
julia> numeros[1] = 0.5;
ERROR: InexactError: Int64(0.5)
[...]
julia> numeros[1] = 5.0;
julia> numeros
3-element Vector{Int64}:
5
2
3Los tipos fundamentales de números reconocidos por Julia son los enteros y decimales. Cada uno de estos tipos tiene distintas representaciones internas:
- Los números enteros son los que tienen más variedad de representaciones internas. Pueden ser binarios (valores lógicos, representados por el tipo
Bool), o de 8, 16, 32, 64 y 128 bits, así como de precsión arbitraria (BigInt). Los enteros entre 8 y 128 bits pueden ser con signo (Int8,Int16, ...,Int128) o sin signo (UInt8,UInt16, etc., números enteros positivos que suelen representarse con códigos hexadecimales). El tipo de entero por defecto se puede representar como el tipoInt, que es un alias deInt32oInt64según la arquitectura del sistema. - Los números decimales (de coma flotante) pueden ser de 16, 32 ó 64 bits (
Float16,Float32,Float64, respectivamente), o de precisión arbitraria (BigFloat). Por defecto sonFloat64en todos los sistemas.
Además, existen otros tipos de números derivados de los anteriores:
- Números racionales (
Rational), compuestos por un numerador y un denominador de números enteros, p.ej.5//3. - Números complejos (
Complex), compuestos por una parte real y una imaginaria de números que pueden ser enteros (p.ej.1 + 2im) o decimales (1.0 + 0.5im).
Finalmente, existe un tipo dedicado específicamente a representar el valor exacto de números irracionales (Irrational), como π o el número de Euler (ℯ), que funcionan de manera distinta.
El uso de números de tipo entero (como Int64) o decimales (Float64, etc.) tiene sobre todo implicaciones en la eficiencia de los programas, pero cuando se trabaja con magnitudes muy grandes (del orden de decenas de billones) también se pueden dar problemas de precisión o incluso errores de cálculo, si no se usa el tipo adecuado. Concretamente, con tipos enteros hay un rango más allá del cual se produce un desbordamiento aritmético; los límites de ese rango pueden consultar con las funciones typemax y typemin (p.ej. typemax(Int64) es el valor 9223372036854775807). Por otro lado, el tipo decimal Float64 no puede representar todos los números enteros a partir de 2^53 (9007199254740992) –por ejemplo el 9007199254740993 no existe en ese tipo–. Para trabajar con precisión y enteros arbitrariamente altos, se puede usar el tipo BigInt.
Reglas de conversión entre tipos
Es útil tener en cuenta cuándo los números de un tipo se pueden convertir a otro. Comenzamos por señalar los casos más claros, según reglas matemáticas:
- Los valores lógicos (
Bool) se pueden convertir a cualquier otro tipo de número entero, siendotrueequivalente a1, yfalseequivalente a0. - Los números enteros se pueden convertir a números decimales con parte decimal nula.
- Los números enteros se pueden convertir a números racionales con denominador igual a
1. - Tanto los números enteros como los decimales se pueden convertir a complejos con parte imaginaria nula.
Además, dentro de la misma categoría existen casos en los que unas representaciones internas engloban a otras:
- Todos los números (enteros o decimales) de N bits pueden convertirse a números de la misma categoría con más bits (p.ej.
Float32aFloat64,Int64aInt128, oUInt8a cualquier otro tipo deUInt. - Los enteros con signo (
Int8,Int16, ...Int128), si contienen valores de signo positivo, pueden convertirse a enteros sin signo (UInt8, etc.) con el mismo número de bits.
Estas reglas de conversión son transitivas; por ejemplo, si un valor lógico se puede convertir a cualquier tipo de entero, y los enteros se pueden convertir a decimales, los valores lógicos también se pueden convertir a decimales, etc.
Por otro lado, las conversiones inversas a las que se han indicado son posibles si se cumplen las condiciones adecuadas:
- Cualquier número de valor equivalente a uno o cero se puede convertir al tipo
Bool(dando lugar atruesi equivale a uno, y afalsesi es cero). - Los números decimales con parte decimal nula se pueden convertir a enteros.
- Los números racionales cuyo numerador es múltiplo del denominador se pueden convertir a enteros.
- Los números complejos con parte imaginaria nula se pueden convertir a números decimales, de valor igual a la parte real.
Las conversiones inversas a las indicadas dentro de la misma categoría de tipos (enteros, decimales) dependen de los valores particulares.
Todas estas conversiones se realizan (o se intenta realizarlas) de forma automática cuando se asigna un valor de un tipo a un array con elementos de otro tipo distinto, y en otras situaciones donde conviene. Pero también se puede hacer explícitamente utilizando el nombre del tipo objetivo como función. Veamos algunos ejemplos:
julia> Float64(true)1.0julia> Rational(2)2//1julia> Complex(0.5)0.5 + 0.0imjulia> UInt16(0x11)0x0011julia> Bool(1+0im)truejulia> Int(8//4)2
Sin embargo, como los ordenadores no tienen precisión infinita, puede que el resultado de una operación que teóricamente debería cumplir alguna de las condiciones necesarias para la conversión no lo haga. Por ejemplo, teóricamente sqrt(5.0)^2 debería dar como resultado el número 5.0, que se debería poder convertir a un entero. Sin embargo lo que tenemos es:
julia> Int(sqrt(5.0)^2)
ERROR: InexactError: Int64(5.000000000000001)El error ya nos indica que el problema es que la operación no nos ha dado un número exactamente entero. Para arreglarlo lo tenemos que forzar a un entero, lo que se puede lograr con la función round (redondeo al número más cercano), así como con floor (redondeo al número inferior) ceil (redondeo al número superior) o trunc (redondeo quitando la parte decimal):
julia> cinco = round(sqrt(5.0)^2)5.0julia> Int(cinco)5
Como el propósito de redondear suele ser convertir a un entero, estas funciones también permiten indicar directamente el tipo de número al que se quiere redondear (normalmente algún tipo de entero):
julia> round(Int, sqrt(5.0^2))5
La funciones round, etc. admiten los argumentos con nombre digits o sigdigits, si se quieren usar para redondear a un número particular de cifras decimales distinto de cero, o a un número dado de cifras signficativas (independientemente de dónde caiga el punto decimal).
Tipos abstractos
Además de estos tipos de números que tienen una representación concreta en memoria, Julia tiene definida una jerarquía de tipos "abstractos", que permite interpretar variables de distintos tipos como elementos de un mismo "supertipo". La jerarquía de tipos numéricos en Julia es la siguiente:
Number ----------------------------------- Complex
|
·- Real -------------------------- Rational
|
·- AbstractIrrational --- Irrational
|
|
·- AbstractFloat -------| BigFloat
| | Float64
| | Float32
| | Float16
|
·- Integer -------------- Bool
|
·- Signed --| BigInt
| | Int128
| | Int64
| | Int32
| | Int16
| | Int8
|
·- Unsigned -| UInt128
| UInt64
| UInt32
| UInt16
| UInt8Cuando se crea un array combinando elementos de distintos tipos, Julia escoge como tipo el "menos abstracto" (el más bajo en la jerarquía) que puede recoger todos los casos, incluyendo posibles conversiones. En la práctica, esto significa que si se combinan distintos tipos de enteros Unsigned se creará un array de UIntX con el número de bits más alto; si se introduce algún entero con signo pasará a ser un array de IntX; si hay algún cualquier otro tipo de número real será de FloatX, y si se añade algún número complejo será un array de Complex.
Por otro lado, si se juntan números y otro tipo de objetos (por ejemplo cadenas de texto), el tipo de elementos del array creado será Any, el "supertipo" abstracto que sirve para recoger cualquier tipo de objeto en Julia:
julia> unos = [1, 1.0, 1+0im, "uno"]4-element Vector{Any}: 1 1.0 1 + 0im "uno"
También es posible declarar explícitamente un array para que sea de un tipo (concreto o abstracto) a elección del usuario, siempre que los elementos introducidos sean compatibles con ese tipo. Si el array se crea introduciendo sus valores entre corchetes, esto se hace anteponiendo el nombre del tipo que se desea:
julia> Real[1, 2, 3]3-element Vector{Real}: 1 2 3
Si se crea mediante una función como cat o sus variantes, zeros, rand, etc., el tipo de variable deseado se puede introducir como primer argumento de la función:
julia> zeros(Real, 3)3-element Vector{Real}: 0 0 0
Si el tipo escogido es abstracto, como en los ejemplos anteriores, esto permite asignar al array resultante elementos de cualquiera de sus "subtipos".
Que un array esté definido como de un tipo abstracto no significa, sin embargo, que sus elementos individuales lo sean. Estos son siempre de tipos concretos, como se puede observar si se consultan sus valores:
julia> unos4-element Vector{Any}: 1 1.0 1 + 0im "uno"julia> typeof(unos[1])Int64julia> typeof(unos[2])Float64julia> typeof(unos[3])Complex{Int64}julia> typeof(unos[4])String
Mutabilidad de los arrays
Una característica importante de los arrays es que son un tipo de objeto mutable, es decir que sus contenidos se pueden modificar. Esto es lo que permite un manejo eficiente de los mismos, como reemplazar los valores de algunas celdas por otros sin tener que crear un array nuevo, y operaciones de "rellenado" como fill!, etc. Sin embargo, también puede dar lugar a que un array se modifique sin haberlo esperado, si no se tiene cuidado al operar con ellos. Para evitar este tipo de sorpresas conviene conocer cómo funciona la asignación de variables. La situación habitual en la que se da este problema es cuando un array se reasigna a otra variable. Por ejemplo:
julia> sa = [1, 2, 3];julia> sb = sa; # Creamos otro array `sb` "igual a `sa`"julia> sa[1] = 0; # Ahora modificamos `sa`...julia> sa = sa * 10; # Volvemos a cambiar `sa`julia> sa # Vemos cómo ha quedado `sa`:3-element Vector{Int64}: 0 20 30
El resultado de sa coincide con el esperado, pero si ahora volvemos a sb, quizás uno no esperaría esto:
julia> sb3-element Vector{Int64}: 0 2 3
Una forma de entender lo que pasa en este ejemplo es considerar que las variables sa, sb no son lo mismo que los objetos contenidos en ellas (en este caso los arrays), sino meras referencias, una especie de "etiquetas" que pueden asignarse de forma independiente, e incluso redundante a los diversos objetos que hay en el espacio de trabajo. La siguiente figura muestra gráficamente lo que ocurre en cada una de las operaciones.
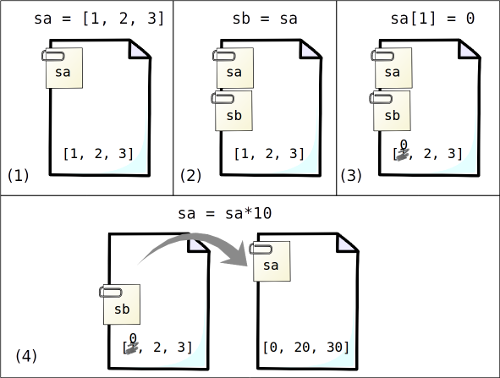
Como los arrays son elementos mutables, al hacer que sb se identifique con sa, los cambios realizados a una de las variables afecta también a la otra –a no ser que una de las variables se reasigne, como ocurre en el cuarto paso–.
Esta situación no ocurre solo al asignar arrays explícitamente, como en el ejemplo mostrado. Un caso común se da al pasar arrays como argumentos de funciones, ya que aunque en el código de la función se use otro nombre, lo que se le pasa es el array original, y las modificaciones que se hagan sobre él se reflejarán también fuera de la función.
Evitar mutaciones inesperadas
Estas situaciones se pueden evitar usando copias de los arrays cuando se asignan a distintas variables. Cuando el array es un vector, la forma más concisa de hacer una copia del mismo es "subindexando" todos sus elementos, como sigue:
julia> sa = sb[:] # Redefinimos `sa` como un vector con los valores de `sb`3-element Vector{Int64}: 0 2 3julia> sa[1] = 1; # Los cambios en `sa`, ya no se aplican a `sb`julia> sa3-element Vector{Int64}: 1 2 3julia> sb3-element Vector{Int64}: 0 2 3
Para cualquier tipo de array también se puede utilizar la función copy o deepcopy. La diferencia entre ambas se oberva cuando los elementos contenidos en el array copiado son también mutables, como un array de arrays. Por ejemplo:
julia> vectores = [[1,2],[3,4]]2-element Vector{Vector{Int64}}: [1, 2] [3, 4]julia> copia_vectores = copy(vectores);julia> copia_vectores[1] = zeros(3); # Reemplazamos el primer vectorjulia> copia_vectores2-element Vector{Vector{Int64}}: [0, 0, 0] [3, 4]julia> vectores # El array original sigue intacto:2-element Vector{Vector{Int64}}: [1, 2] [3, 4]julia> copia_vectores[2][1] = 0; # Pero si hacemos cambios a otro nivel...julia> copia_vectores2-element Vector{Vector{Int64}}: [0, 0, 0] [0, 4]julia> vectores # ... `copy` no ha evitado la mutación2-element Vector{Vector{Int64}}: [1, 2] [0, 4]
Por otro lado, si usamos deepcopy en lugar de copy sí que se evitan las modificaciones en todos los niveles:
julia> vectores = [[1,2],[3,4]]2-element Vector{Vector{Int64}}: [1, 2] [3, 4]julia> copia_vectores = deepcopy(vectores);julia> copia_vectores[2][1] = 0;julia> copia_vectores2-element Vector{Vector{Int64}}: [1, 2] [0, 4]julia> vectores2-element Vector{Vector{Int64}}: [1, 2] [3, 4]
El paquete StaticArrays proporciona unos tipos especiales de arrays con dimensiones fijas, y que pueden ser inmutables (SVector, SMatrix, SArray...) o también mutables (MVector, etc.), según convenga. Además de que es más fácil controlar mutaciones accidentales, la principal ventaja de este tipo de arrays es que su manejo puede ser mucho más eficiente en términos de consumo de memoria y de tiempo (sobre todo para arrays pequeños).
Forzar la mutación
También se puede dar la situación inversa, cuando se quiere hacer una referencia a parte de un array y operar con ella de forma que los cambios se apliquen al original. Por ejemplo, supongamos que queremos modificar la última columna de una matriz rellenándola de otros valores:
julia> matriz = zeros(2,3)2×3 Matrix{Float64}: 0.0 0.0 0.0 0.0 0.0 0.0julia> fill!(matriz[:, 3], 0.5)2-element Vector{Float64}: 0.5 0.5julia> matriz2×3 Matrix{Float64}: 0.0 0.0 0.0 0.0 0.0 0.0
Esto no ha funcionado, porque matriz[:, 3] es vector en el que se ha copiado de la tercera columna de matriz, lo mismo que sb[:] contenía una copia de sb en el ejemplo de la sección anterior.
La forma de trabajar con una parte del array sin hacer una copia es mediante la función view –o para mayor comodidad, con la macro[1] @view, que permite utilizar un código más semejante al usado cuando se trabaja con copias–:
julia> matriz = zeros(2,3)2×3 Matrix{Float64}: 0.0 0.0 0.0 0.0 0.0 0.0julia> ultima_columna = @view matriz[:, 3]2-element view(::Matrix{Float64}, :, 3) with eltype Float64: 0.0 0.0julia> fill!(ultima_columna, 0.5)2-element view(::Matrix{Float64}, :, 3) with eltype Float64: 0.5 0.5julia> matriz2×3 Matrix{Float64}: 0.0 0.0 0.5 0.0 0.0 0.5
Manipulación de las dimensiones
Además del tipo de variables contenidas, los arrays tienen unas dimensiones determinadas, por lo que en general no se puede acceder a posiciones fuera de esas dimensiones, ni para leerlas ni para asignarles valores en ellas. En el caso particular de los vectores, sin embargo, hay múltiples funciones para redimensionarlos (sin tener que crear nuevas variables):
resize(v, n)para cambiar la longitud del vectorvanelementos (añadiendo valores indefinidos sines mayor que la longitud original dev).push!(v, x, y...)para añadir uno o más elementos (x,y, etc.), al final del vectorv.pushfirst!(v, x, y...)para añadir uno o más elementos (x,y, etc.) al principio del vectorv.insert!(v, i, x)para insertar el elementoxen la posiciónidel vectorv(moviendo la posición de los siguientes elementos).append!(v, w)para extender el vectorvañadiéndole el conjunto de datosw(otro vector u otro tipo de colección) al final.prepend!(v, w)para extender el vectorvañadiéndolo los datos dewal principio.pop!(v)para extraer y eliminar el último elemento del vectorv.popfirst!(v)para extraer y eliminar el primer elemento del vectorv.deleteat!(v, indices)para eliminar los elementos señalados enindicesdel vectorv.splice!(v, indices, w)para eliminar los elementos señalados enindicesdel vectorv, y opcionalmente poner los elementos dewen su lugar (semejante a una combinación dedeleteat!einsert!).empty!(v)para eliminar todos los elementos del vectorv.
Aunque estas operaciones facilitan la creación dinámica de vectores, si se conoce de antemano el número de elementos que se ha de gestionar en un vector es recomendable predefinirlo con el tamaño necesario para contener todos los elementos que requiera, sobredimensionándolo si hace falta. El redimensionamiento de los vectores tiene un coste computacional, que puede ralentizar significativamente la velocidad de los cálculos.
En lo que respecta a matrices y arrays multidimensionales en general, la única manera de añadir elementos, filas, columnas, etc. a un array es crear uno nuevo mediante cat o las operaciones relacionadas que se han explicado en la primera sección de este capítulo.
Otro tipo de manipulación que se puede hacer con los arrays es redimensionarlos o reordenar sus dimensiones. Un ejemplo que ya hemos visto al principio de este capítulo es la función reshape, con la que se crea un array con nuevas dimensiones (manteniendo el número total de elementos).
Por otro lado, la función permutedims sirve para cambiar el orden de las dimensiones, sin cambiar el número de elementos en cada una. El primer argumento de estas funciones es el array a reorganizar, al que siguen los índices de las dimensiones originales, en el orden en el que se quieren dejar (organizados en una "tupla", es decir entre paréntesis). Por ejemplo, el siguiente código intercambia la primera y la tercera dimensión de un array tridimensional, dejando la segunda en el mismo lugar:
julia> numeros = cat([1 10; 2 20; 3 30], [0.1 0.01; 0.2 0.02; 0.3 0.03], dims=3)3×2×2 Array{Float64, 3}: [:, :, 1] = 1.0 10.0 2.0 20.0 3.0 30.0 [:, :, 2] = 0.1 0.01 0.2 0.02 0.3 0.03julia> permutedims(numeros, (3, 2, 1))2×2×3 Array{Float64, 3}: [:, :, 1] = 1.0 10.0 0.1 0.01 [:, :, 2] = 2.0 20.0 0.2 0.02 [:, :, 3] = 3.0 30.0 0.3 0.03
Los elementos de los arrays resultantes de estas operaciones son referencias directas a los elementos de los originales. Esto significa que los cambios que se hagan en los arrays transformados también modificarán los primeros.
Broadcasting
Cuando se quiere aplicar una misma operación a todos los elementos de un array, o a los de varios arrays del mismo tamaño, se puede escribir un bucle que recorra sus distintos elementos; pero también existe una forma especial de operar, conocida como broadcasting, que tiene una sintaxis compacta y muy práctica.
Vamos a ver un ejemplo con la operación para calcular el módulo de un vector de dos elementos, que se usó para introducir esta forma de operar en el capítulo 2. Primero vemos los resultados de la operación con escalares:
julia> x = 0.5; y = 1.2;julia> sqrt(x^2 + y^2)1.3julia> x = 3; y = 4;julia> sqrt(x^2 + y^2)5.0
Si los dos valores de x y los dos de y los tuviéramos en sendos vectores, podríamos hacer la operación con todos sus elementos a la vez, utilizando la sintaxis de broadcasting, que esencialmente consiste en añadir un punto tras los nombres de las funciones, o antes de los operadores. El resultado lo asignaremos a otro vector m definido de antemano, para mostrar como esas "operaciones con punto" también incluyen la asignación de valores a arrays existentes:
julia> x = [0.5, 3]; y = [1.2, 4]; m = zeros(2);julia> m .= sqrt.(x.^2 .+ y.^2)2-element Vector{Float64}: 1.3 5.0
A esta técnica se le llama broadcasting porque consiste en transmitir una operación escalar a todos los elementos de los operandos, y también porque los valores escalares (p.ej. el 2 que se utiliza como exponente en el código anterior) se aplican a todos los elementos de los arrays, como si ellos mismos estuviesen en arrays de la misma dimensión, con el mismo valor en todas las celdas. Además, los arrays también se pueden comportar como si sus dimensiones "unitarias" se ampliasen en la medida necesaria. Esto se ve mejor con otro ejemplo:
Imaginemos que queremos multiplicar cada elemento del vector columna [1, 2, 3] por cada uno del vector fila [4 5], a la manera de un producto tensorial. Una forma de hacerlo sería multiplicar dos matrices de tamaños congruentes, cuyas filas y columnas fuesen réplicas de esos vectores. Por ejemplo, usando la función repeat:
julia> a = [1, 2, 3]3-element Vector{Int64}: 1 2 3julia> b = [4 5]1×2 Matrix{Int64}: 4 5julia> ma = repeat(a, 1, 2) # filas repetidas una vez, columnas dos veces3×2 Matrix{Int64}: 1 1 2 2 3 3julia> mb = repeat(b, 3, 1) # filas repetidas tres veces, columnas una vez3×2 Matrix{Int64}: 4 5 4 5 4 5julia> ma .* mb # Multiplicación con broadcasting3×2 Matrix{Int64}: 4 5 8 10 12 15
Sin embargo, esto no es necesario, ya que el mecanismo de broadcasting realiza los cálculos equivalentes a partir de los vectores originales, de forma más eficiente:
julia> a .* b3×2 Matrix{Int64}: 4 5 8 10 12 15
Normalmente, para hacer una operación "elemento a elemento" con los arrays es necesario hacerlo mediante broadcasting, ya que de lo contrario se intentará hacer la operación considerando el array completo como un objeto individual. A veces puede querer hacerse eso mismo; por ejemplo se pueden comparar dos arrays en su conjunto, que no es lo mismo que comparar los elementos individuales y guardar las comparaciones en un array de resultados:
julia> [1, 2, 3] == [1, 2, 4] # comparación de los arraysfalsejulia> [1, 2, 3] .== [1, 2, 4] # comparación de sus elementos3-element BitVector: 1 1 0
Cuando se combinan varias operaciones en la misma línea, puede resultar engorroso y poco estético añadir puntos a todas las funciones y operadores. Un truco para escribir código más "limpio" es utilizar la macro @., que convierte en operaciones con boradcasting todo lo que sigue en esa línea, por ejemplo, la operación del primer ejemplo de esta sección se puede escribir de las siguientes dos maneras:
m .= sqrt.(x.^2 .+ y.^2)
@. m = sqrt(x^2 + y^2)Operaciones matriciales
Las matrices numéricas son solo un tipo particular de arrays, pero especialmente relevante, ya que son un elemento fundamental del álgebra lineal. Debido a su importancia, hay una gran cantidad de operaciones matemáticas específicas para este tipo de variables, que no son aplicables a arrays no numéricos o de más dimensiones. Sí se pueden usar, sin embargo, con vectores, con los que a estos efectos se opera como si fueran matrices de una sola columna.
Las cálculos matriciales incluyen las operaciones algebraicas elementales (suma, resta, multiplicación, división, potenciación por un escalar...), cálculos en el espacio de los números complejos, y cálculos numéricos como exponenciales, logaritmos, funciones trigonométricas, etc. En el caso particular de la suma y la resta de matrices, el resultado es el mismo que si se hace "elemento a elemento":
julia> m = [4 1 -1; 1 2 1; -1 1 2]3×3 Matrix{Int64}: 4 1 -1 1 2 1 -1 1 2julia> m2 = ones(3, 3)3×3 Matrix{Float64}: 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0julia> m + m2 # suma matricial3×3 Matrix{Float64}: 5.0 2.0 0.0 2.0 3.0 2.0 0.0 2.0 3.0julia> m .+ m2 # suma de elementos3×3 Matrix{Float64}: 5.0 2.0 0.0 2.0 3.0 2.0 0.0 2.0 3.0
Aunque los resultados sean iguales, el proceso de cálculo de la suma matricial es distinto. Una diferencia práctica es que la suma matricial no realiza broadcasting; pero por otro lado las funciones de cálculo de álgebra lineal están extraordinariamente optimizadas, lo que significa que para matrices grandes la suma matricial es mucho más rápida.
Para cualquier otra operación, no tiene nada que ver hacer el cálculo con la matriz completa o con sus elementos individuales:
julia> m * m2 # producto de matrices3×3 Matrix{Float64}: 4.0 4.0 4.0 4.0 4.0 4.0 2.0 2.0 2.0julia> m .* m2 # producto de los elementos3×3 Matrix{Float64}: 4.0 1.0 -1.0 1.0 2.0 1.0 -1.0 1.0 2.0julia> exp(m) # exponencial de la matriz3×3 Matrix{Float64}: 82.9048 22.8424 -22.8424 22.8424 17.2315 2.85401 -22.8424 2.85401 17.2315julia> exp.(m) # exponencial de los elementos3×3 Matrix{Float64}: 54.5982 2.71828 0.367879 2.71828 7.38906 2.71828 0.367879 2.71828 7.38906
En el caso de las operaciones elementales (multiplicación, potencia, etc.) se utilizan las reglas de cálculo matricial comúnmente conocidas. Para otras operaciones más complejas se utilizan aproximaciones numéricas a la definición matemática de la función, de forma análoga a las operaciones con escalares.
Matrices transpuestas
La transposición de matrices es una operación habitual en el álgebra lineal. En una sección anterior ya hemos visto cómo intercambiar filas por columnas en matrices de cualquier tipo con la función permutedims. En el caso de las matrices numéricas, esta operación se realiza de manera mucho más eficiente a través de la función transpose.
Una diferencia fundamental entre usar transpose y permutedims con matrices, es que aunque transpose guarde el resultado en una nueva variable, en realidad no crea una matriz nueva, sino que la variable que representa la matriz transpuesta mantiene una referencia a la original. Esto significa que los cambios que se hagan en cualquiera de las dos afectan a la otra. Por ejemplo:
julia> m = [1 2 3; 4 5 6]2×3 Matrix{Int64}: 1 2 3 4 5 6julia> mt = transpose(m)3×2 transpose(::Matrix{Int64}) with eltype Int64: 1 4 2 5 3 6julia> m[1, 2] = 20; # cambiamos un elemento de `m`julia> m2×3 Matrix{Int64}: 1 20 3 4 5 6julia> mt # y el cambio también afecta a `mt`3×2 transpose(::Matrix{Int64}) with eltype Int64: 1 4 20 5 3 6
Las matrices transpuestas se suelen usar en para resolver problemas algebraicos (factorización, inversión...) que implican matrices con números reales. Cuando las matrices pueden contener números complejos, lo que se suele usar son sus transpuestas conjugadas, en las que la parte imaginaria aparece con el signo opuesto. La transpuesta conjugada (también llamada matriz adjunta) se obtiene con la función adjoint, o más concisamente escribiendo un apóstrofe tras la matriz:
julia> mc = [1 -2im; 1+0.5im 0]2×2 Matrix{ComplexF64}: 1.0+0.0im 0.0-2.0im 1.0+0.5im 0.0+0.0imjulia> mc'2×2 adjoint(::Matrix{ComplexF64}) with eltype ComplexF64: 1.0-0.0im 1.0-0.5im 0.0+2.0im 0.0-0.0imjulia> adjoint(mc)2×2 adjoint(::Matrix{ComplexF64}) with eltype ComplexF64: 1.0-0.0im 1.0-0.5im 0.0+2.0im 0.0-0.0im
Cuando se trabaja con matrices de números reales, la transpuesta conjugada es lo mismo que la transpuesta "a secas", por lo que se suele usar la sintaxis con el apóstrofe para que el código sea más conciso.
Matrices diagonales
En muchos cálculos se hace uso de matrices diagonales, es decir matrices que son nulas en todos los elementos menos en la diagonal principal. En el módulo LinearAlgebra hay un tipo especial de matrices para este propósito, llamado Diagonal. Una matriz de este tipo se puede construir fácilmente a partir de un vector con los valores a incluir en la diagonal:
julia> using LinearAlgebrajulia> Diagonal([1,2,3])3×3 LinearAlgebra.Diagonal{Int64, Vector{Int64}}: 1 ⋅ ⋅ ⋅ 2 ⋅ ⋅ ⋅ 3
Las posiciones fuera de la diagonal se interpretan como ceros, pero en realidad no "existen" (es decir, no tienen representación en memoria), por lo que no se pueden modificar.
A la hora de presentar matrices de tipo Diagonal en pantalla, esos valores inexistentes se muestran como puntos centrados. En algunos entornos (en particular el REPL por defecto para Windows), este carácter no se muestra correctamente.
Una matriz diagonal particularmente importante es la "matriz identidad", equivalente a la unidad en el álgebra de matrices, cuya diagonal está compuesta enteramente de unos. Una matriz diagonal de tamaño n×n podría construirse como Diagonal(ones(n)). Pero también existe un tipo especial para esta matriz particular, que se construye con la letra I mayúscula (la forma habitual de representar la matriz identidad).
I representa una matriz identidad de cualquier tipo numérico y tamaño, de tal manera que se puede utilizar en distintas operaciones algebraicas sin añadirle más detalles. Por ejemplo, supongamos que queremos definir una matriz que, al multiplicarla por un vector cualquiera, dé como resultado la proyección de dicho vector sobre el plano perpendicular a otro vector (unitario) n. Esa matriz está definida como la matriz identidad menos el producto tensorial de n por sí mismo. Esto se puede escribir como I - n*n', sin tener que especificar el tamaño de I. Veamos un caso particular:
julia> n = [1/3, 2/3, 2/3];julia> I - n * n'3×3 Matrix{Float64}: 0.888889 -0.222222 -0.222222 -0.222222 0.555556 -0.444444 -0.222222 -0.444444 0.555556
Para crear una matriz identidad con un tipo de número y tamaño concreto (no necesariamente cuadrada), se puede utilizar la siguiente sintaxis:
julia> Matrix(1.0 * I, 3, 5) # Numeros decimales (como 1.0), de tamaño 3×53×5 Matrix{Float64}: 1.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0
(Si se cambia el 1.0 de este ejemplo por cualquier otro número, las entradas de la diagonal aparecerán multiplicadas por ese número.)
A veces puede interesar también crear matrices "pseudo-diagonales", en las que las diagonales con valores no nulos no sean la central. Para esto se puede usar la función diagm, que toma como argumentos parejas de índices y vectores, del tipo d => v, donde d es el índice de una diagonal, y v el vector con los valores de la misma. La diagonal central tiene como índice 0, las diagonales superiores tienen índices positivos, y las inferiores índices negativos. El resultado es una matriz cuadrada, con el tamaño necesario para contener los valores introducidos. Por ejemplo:
julia> pseudodiagonal = diagm(2 => [1, 2, 3], -1 => [4,5])5×5 Matrix{Int64}: 0 0 1 0 0 4 0 0 2 0 0 5 0 0 3 0 0 0 0 0 0 0 0 0 0
Complementariamente, la función diag(m, i) sirve para extraer la diagonal con índice i de la matriz m (por defecto la diagonal principal, si no se especifica ningún índice):
julia> diag(pseudodiagonal, -1)4-element Vector{Int64}: 4 5 0 0
Otras operaciones
El álgebra de matrices es un campo muy amplio, del que solo hemos visto aspectos relacionados con la creación de las matrices y operaciones elementales. Una presentación completa de las operaciones y funciones disponibles excede en mucho el enfoque de esta guía, pero se puede encontrar la referencia completa en la página sobre álgebra lineal del manual oficial de Julia.
Sumario del capítulo
En este capítulo hemos visto cómo trabajar con arrays (vectores, matrices y conjuntos de datos multidimensionales en general). En particular, se ha explicado:
- Cómo crear arrays de distintas dimensiones con las funciones
cat,hcat,vcat,hvcat, o mediante la sintaxis abreviada con corchetes (a partir de valores concretos), así como algunas formas de hacer arrays con valores predefinidos (a través dezeros,ones,trues,falses,fillofill!), o con valores indefinidos (usando constructores conundef). - La definición de algunas matrices especiales: matrices diagonales con
diagmy de tipoDiagonal, y la matriz identidad conI; uso de la funcióndiagpara extraer diagonales de una matriz. - Cómo añadir y eleminar elementos de vectores (sin crear nuevas variables) mediante las funciones
push!,pushfirst!,insert!,append!,prepend!,pop!,popfirst!,deleteat!,splice!yempty!. - Cómo reorganizar las dimensiones de arrays mediante las funciones
reshapeypermutedims– y en el caso de matrices numéricas, contransposeyadjoint(o con el operador'como forma abreviada deadjoint). - La sintaxis para "subindexar" arrays a través de índices numéricos y rangos, y el uso de la macro
@viewpara que los subarrays creados hagan referencia a los valores originales. - La sintaxis para aplicar broadcasting a las operaciones con arrays (funciones y operadores "con punto").
Además, se han explorado otros aspectos de Julia no estrictamente asociados a los arrays, aunque tienen especial relevancia en los mismos:
- Los distintos tipos de variables, y en particular la familia de tipos numéricos: las relaciones jerárquicas entre ellos, las posibilidades de conversión entre tipos, y cómo definir los arrays para manejar distintos tipos de variables.
- Cómo funciona la asignación de objetos a variables en Julia, las implicaciones que esto tiene sobre los objetos mutables (como los arrays), y el uso de las funciones
copyydeepcopypara evitar mutaciones no deseadas al reasignar objetos a distintas variables.
Finalmente, también se han explicado algunas funciones del módulo Random para la generación de números aleatorios (p.ej. rand, rand!, randn y randn!), y la configuración de la "semilla" (Random.seed!) para asegurar la reproducibilidad de los resultados cuando se usan esas funciones.
- 1Las macros son un tipo especial de instrucciones que se utilizan como "truco" para generar expresiones más complejas a partir de otras más sencillas. En Julia, las macros se identifican por nombres que comienzan con
@, como@view. Su definición es un tema complejo que no se aborda en esta guía, pero por simplificar se pueden considerar como una especie de funciones, aunque sus argumentos no suelen ser variables sino otras instrucciones. Para más detalles, se puede consultar (en inglés) la sección sobre macros del manual oficial.